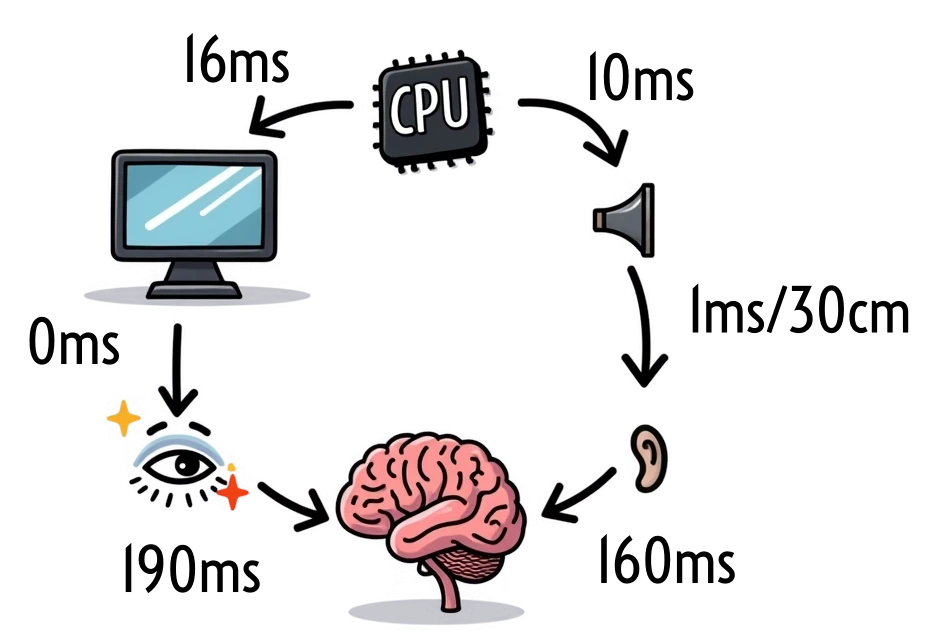
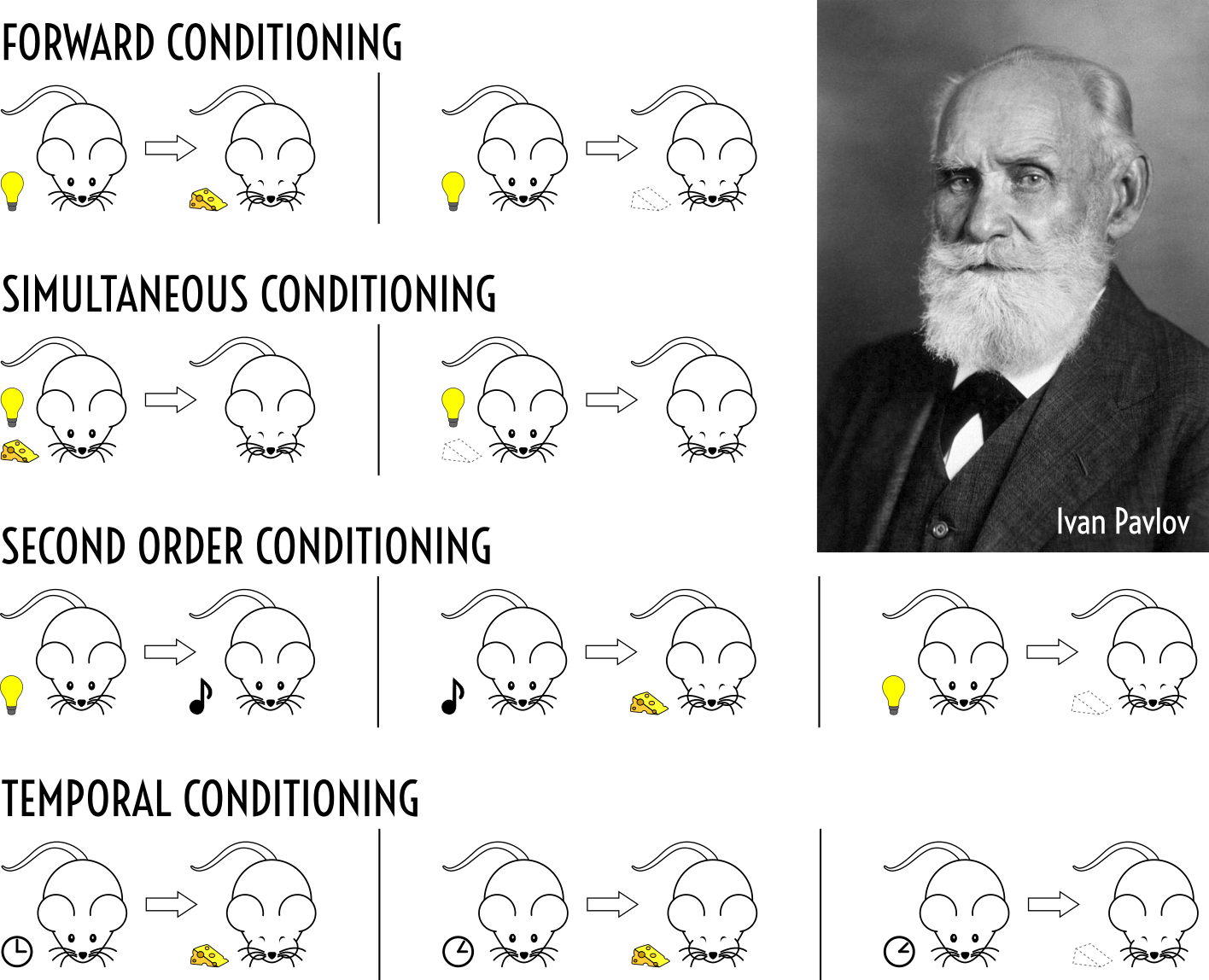
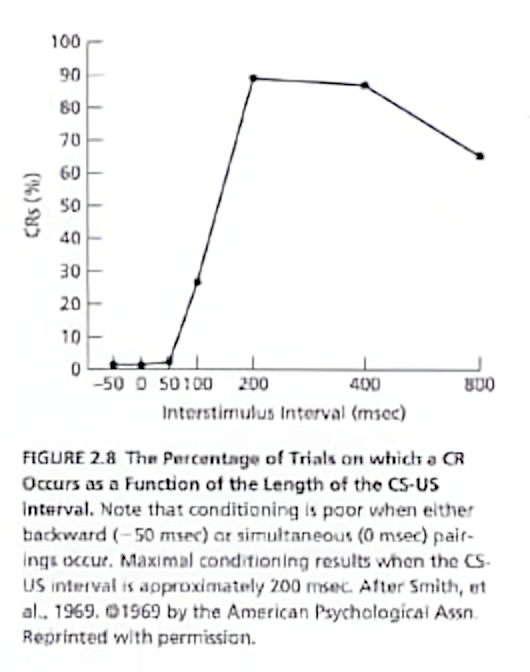
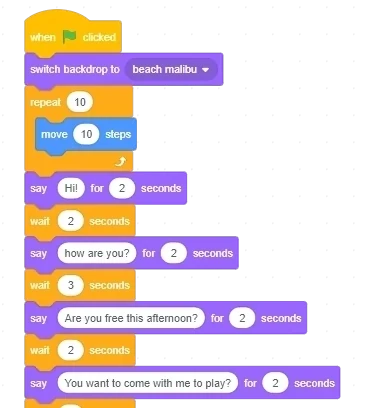
Classical conditioning requires some latency ≠ 0.
Understanding / mental model of the task is optional.
Known problem → New domain
User interface


 Easy to
integrate
Easy to
integrate
 No complex
interactions
No complex
interactions



function LinearApproach(value, velocity, target, delta_t) {
value -= target;
value = Math.max(Math.abs(value) - delta_t * velocity, 0)
* Math.sign(value);
return value + target;
}
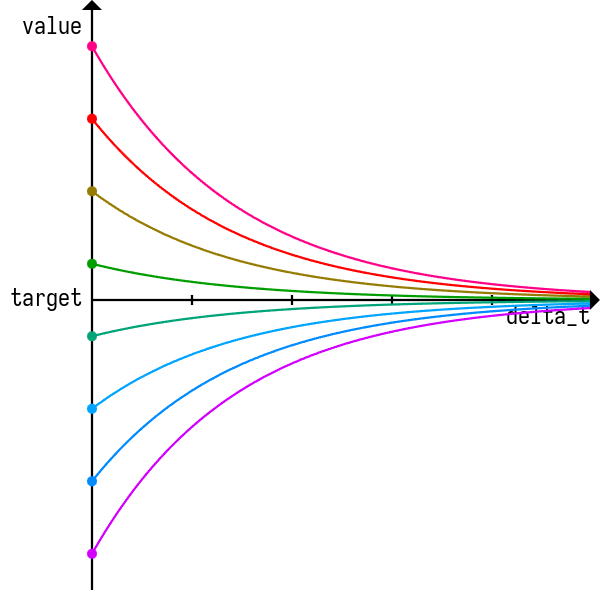
x = LERP(x, target, 0.1)function ExponentialApproach(value, half_t, target, delta_t) {
value -= target;
value *= Math.pow(0.5, -delta_t / half_t);
return value + target;
}function ExponentialApproach(value, half_t, target, delta_t) {
return value
+ (value - target) * Math.expm1(-delta_t / half_t * Math.LN2);
}


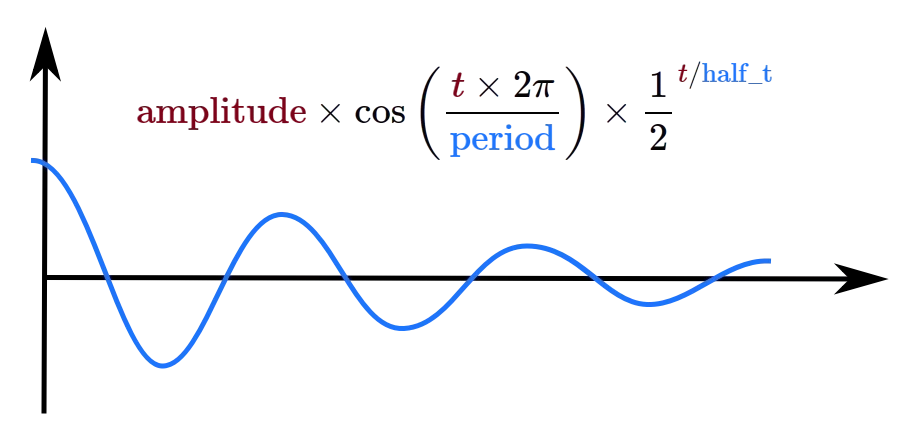
function SineApproach(value, velocity, period, target, delta_t) {
let P1 = 2 * Math.PI / Number(period);
let y = value - target;
let v = velocity;
let a; // a = amplitude / 2!
if (Math.abs(velocity) < 1e-6) {
a = y / 2;
} else {
a = (v * v / P1 / P1 + y * y) / y / 2;
}
if (Math.abs(a) > Math.abs(y)) a = y;
if (v < -Math.abs(a) * P1) {
v = -Math.abs(a) * P1;
} else if (v > Math.abs(a) * P1) {
v = Math.abs(a) * P1;
}
let fract = Math.abs((a * P1 + v) / (a * P1 - v));
let x = -2 * Math.atan(Math.sqrt(fract));
if (isNaN(x)) x = 0;
if (x > Math.PI / 2) x -= Math.PI * 2;
x += delta_t * P1;
if (x > Math.PI / 2) x = Math.PI / 2;
return [a * (1 - Math.sin(x)) + target, // new value
-a * P1 * Math.cos(x)]; // new velocity
}
function SpringApproach(value, velocity, period, half_life, target, delta_t) {
let P1 = 2 * Math.PI / period;
let P2 = -1 / Math.LOG2E / half_life;
let y = value - target; // y = a * cos(t * P1) * exp(t * P2)
let v = velocity; // v = a * exp(t * P2) * (P2 * cos(t * P1) - P1 * sin(t * P1))
let arg = P1 * y / Math.sqrt(P1 * P1 * y * y + P2 * P2 * y * y - 2 * P2 * v * y + v * v);
if (isNaN(arg)) {
return [target, 0];
}
let ts = [-Math.acos(-arg) / P1, Math.acos(-arg) / P1, Math.acos(arg) / P1, -Math.acos(arg) / P1];
let best_t, best_a;
let best_t_err = Infinity;
for (let t of ts) {
let a = y / Math.cos(t * P1) / Math.exp(t * P2);
let new_v = a * Math.exp(t * P2) * (P2 * Math.cos(P1 * t) - P1 * Math.sin(P1 * t));
let err = Math.abs(velocity - new_v);
if (err < best_t_err) {
best_t = t;
best_a = a;
best_t_err = err;
}
}
let t = best_t + delta_t;
let a = best_a;
return [a * Math.exp(t * P2) * Math.cos(t * P1) + target, // new value
a * Math.exp(t * P2) * (P2 * Math.cos(P1 * t) - P1 * Math.sin(P1 * t))]; // new velocity
}| Approach: | Analytic | Simulation |
| Code bloat: | A function | A library (physics engine) |
| Parameters: | Period, Half-time | Spring constant, Mass, Damping |
| State: | Value, Velocity | Whole physics engine |
| Accuracy: | Excellent | Tick-rate dependent |

function WarpApproach(value, velocity, warp_time, warp_dist, target, delta_t) {
let y = (value - target) / warp_dist;
let v = velocity * warp_time / warp_dist;
let angle = Math.atan(v);
let a_sign = y <= 0 ? 1 : -1;
let a_x = Math.cos(angle + Math.PI / 2 * a_sign);
let a_y = y + Math.sin(angle + Math.PI / 2 * a_sign);
let b_x, b_y = -a_sign;
if (a_x < 0 && Math.abs(b_y - y) <= 1 && Math.abs(y) < Math.abs(a_y + b_y) / 2) {
b_x = Math.sqrt(1 - (b_y - y) * (b_y - y)); // B tangent to current position
} else if (Math.abs(a_y) < 1) { // B tangent to A
b_x = a_x + Math.sqrt(4 - (b_y - a_y) * (b_y - a_y));
} else { // B on the right side of A
b_x = a_x + 2;
}
let x = delta_t / warp_time, y_result, dir = 0;
if (x >= b_x) {
return [target, 0];
} else if (x < (a_x + b_x) / 2) {
let alpha = Math.acos(x - a_x);
dir = 1 / Math.tan(alpha) * a_sign * warp_dist / warp_time;
y_result = -a_sign * Math.sin(alpha) + a_y;
} else {
let alpha = Math.acos(x - b_x);
dir = -1 / Math.tan(alpha) * a_sign * warp_dist / warp_time;
y_result = a_sign * Math.sin(alpha) + b_y;
}
return [y_result * warp_dist + target, dir];
}
function AnimationFrame(t) {
...
[screenX, velocityX] = SpringApproach(screenX, velocityX, 0.4, 0.2, /* targetX */ mouseX, delta_t);
[screenY, velocityY] = SpringApproach(screenY, velocityY, 0.4, 0.2, /* targetY */ mouseY, delta_t);
...
}
onmousemove = function(event) {
...
screenX += event.movementX;
screenY += event.movementY;
...
}
let Snap = function (x, y): [number, number] { ... }
onmousemove = function(event) {
...
[targetX, targetY] = Snap(event.clientX, event.clientY);
if (targetX != lastX || targetY != lastY) {
screenX += event.movementX;
screenY += event.movementY;
}
[lastX, lastY] = [targetX, targetY];
...
}
div.addEventListener('mouseenter', function (e) {
let A = star.getBoundingClientRect();
e.target.appendChild(star);
let B = star.getBoundingClientRect();
star.offsetX += A.left - B.left;
star.offsetY += A.top - B.top;
});